Intro

Welcome to GlitchOwl. This is a collection of selected experiments focused on motion, procedural setups, technical art and visual prototypes.
You can jump directly to Projects to browse the work.
A place for experiments, animation systems, mechanical rigs and visual prototypes.
Welcome to GlitchOwl. This is a collection of selected experiments focused on motion, procedural setups, technical art and visual prototypes.
You can jump directly to Projects to browse the work.
2026-04-04 :: Actuators Model Update
Actuators, blender collection export, knee range-tele smoothing
2026-03-31 :: Actuators Model Update
Actuators, blender collection export, knee range-tele smoothing
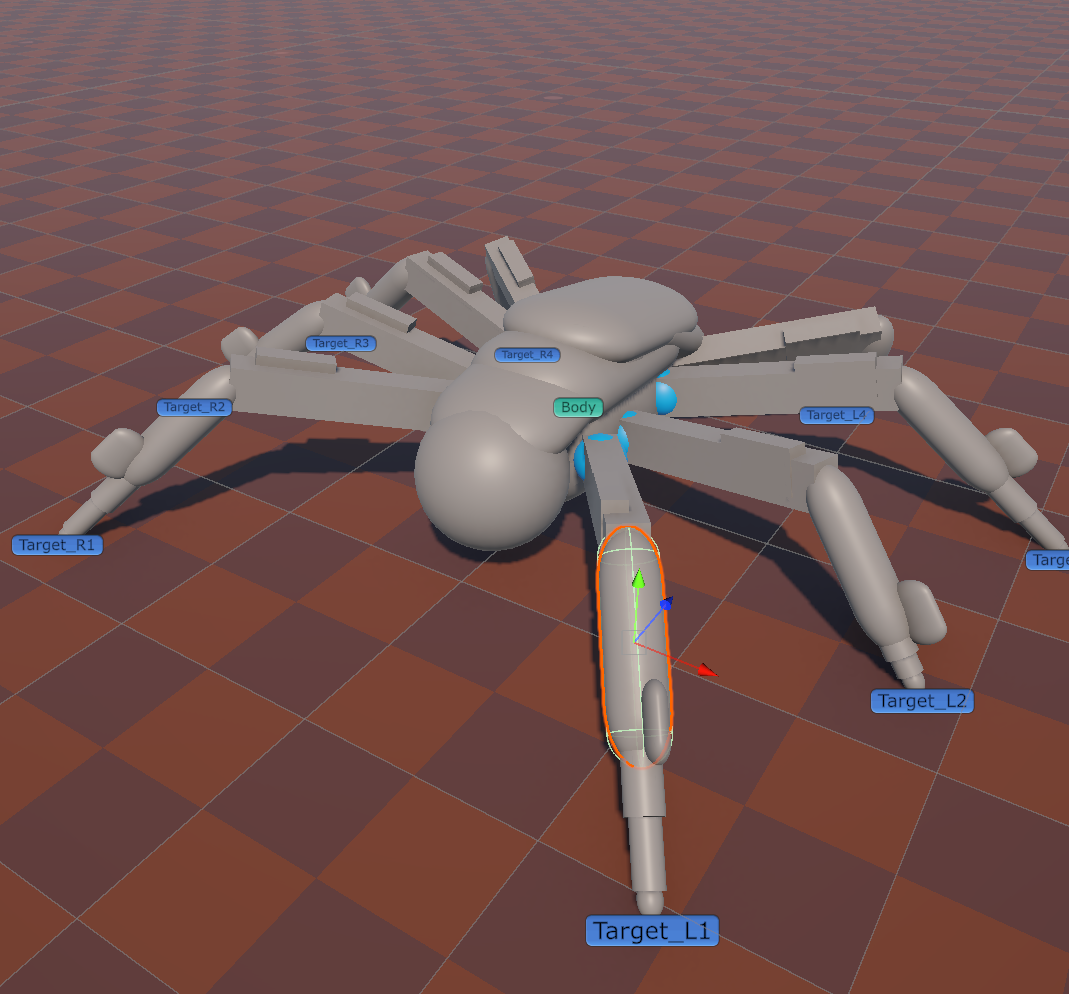
2026-03-29 :: IK and Actuators
Working IK solver with actuators
2026-03-25 :: 8 Legs
Blocking hip gimbal
2026-03-23 :: Hip Gimbal Concept
Blocking hip gimbal
2026-03-22 :: Mesh Rotation Driven by IK
To match the mesh with IK orientation:
This avoids issues with Euler angles and keeps the behaviour consistent regardless of plane tilt.
2026-03-21 :: IK Plane + Roll Separation
Reworked the IK system to separate orientation from solving.
The result is a stable and predictable system where the space is controlled instead of the solver being forced to adapt.

Experiment around curve-based motion and travel behavior. The goal was to explore predictable movement along custom paths and shape-driven animation flow.
Follow-up tests extending the idea toward cleaner timing, direction handling and visual clarity.
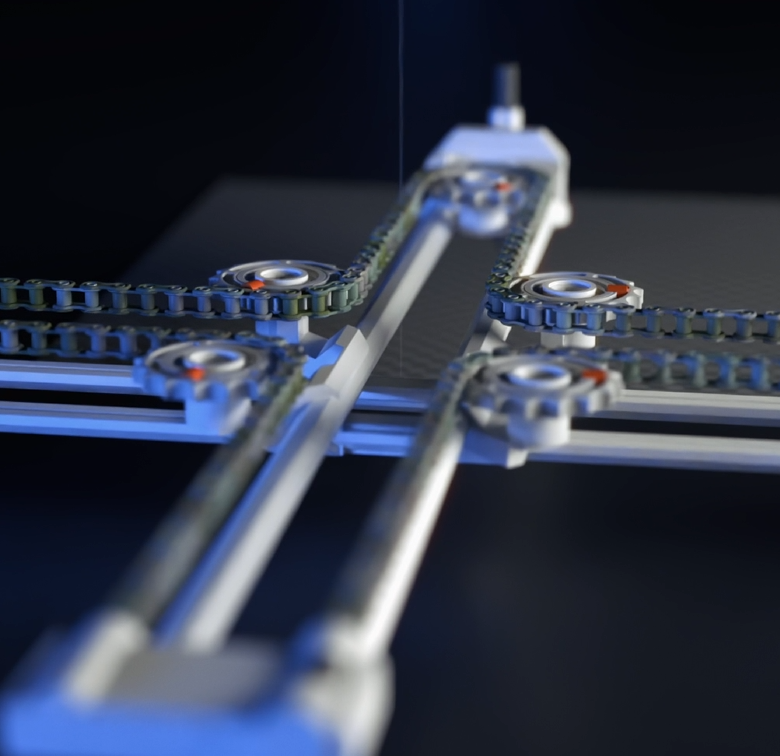
Mechanical plotter concept investigating chain-based motion, linkage layout and presentation. The focus is on motion readability and the feel of the mechanism.
Additional studies looking at proportions, movement paths and prototype presentation.

Visual exploration built around pattern, rhythm and graphic repetition. This project is more focused on visual language than on mechanism.
Secondary variations testing motion and presentation ideas for future visual studies.

I create experiments around animation systems, mechanical rigs, procedural motion and visual prototyping.